기록: UCL Course on RL 요약 및 정리 (Lecture 4: Model-Free Prediction)
This post covers not only Lecture 4: Model-Free Prediction (davidsilver.uk) but also:
- Bernoulli trial - Wikipedia
- Geometric distribution - Wikipedia
- Memorylessness - Wikipedia
- The entire course materials can be found on the following page: Teaching - David Silver.
Lecture Goal
- Solve an unknown MDP
- All information of an MDP is not necessarily given (e.g., reward, transition probabilities, etc.)
- Model-free prediction: estimate the value function of an unknown MDP (this lecture)
- Monte-Carlo, Temporal-difference, TD(\(\lambda\))
- Model-free control: optimize the value function of an unknown MDP (lecture 5)
 |
| Monte Carlo | via Forbes Travel Guide |
Monte-Carlo Reinforcement Learning
- MC methods learn directly from episodes of experience
- MC is model-free: no knowledge of MDP transitions/rewards
- MC learns from complete episodes: no bootstrapping
- MC uses the simplest possible idea: value = mean return
- Warning: can only apply MC to episodic MDPs
- All episodes must terminate (like Go and Atari games)
Monte-Carlo Policy Evaluation
- Goal: evaluate \(v_{\pi}\) from complete episodes of experience under policy \(\pi\)
- \(\pi(a|s)\)를 따라 action을 sampling(또는 결정)해가면서 최종적으로 게임이 종료되는 termination state까지 간 다음에 최종 return를 계산한다. 이렇게 한 번의 episode가 끝나고 나면 다시 \(S=s\)로 돌아가서 action sampling을 해가면서 또 다시 episode를 구성하고 reward를 계산한다. 이렇게 무수히 많은 episode를 경험하여 return의 표본 평균을 구하면, 결국 큰 수의 법칙(law of large numbers)에 의해 \(v_{\pi} = \mathbb{E}[G_t|S_t=s]\)와 매우 가까워지게 된다.
- \(G_t = R_{t+1} + \gamma R_{t+2} + \cdots + \gamma^{T-1}R_T\)
First-Visit Monte-Carlo Policy Evaluation
- To evaluate state \(s\), for each episode,
- Note: episode는 agent의 action과 환경의 state transition으로 진행됨
- The first time-step \(t\) that state \(s\) is visited in an episode,
- Note: 한 episode는 여러 state로 구성되므로, episode 동안 처음 방문하는 모든 state에 대해 아래 \(N(s), V(s)\)를 update하는 꼴
- Increment the counter \(N(s) \leftarrow N(s) + 1\)
- Increment the value estimator \(V(s) \leftarrow V(s) + \frac{1}{N(s)}(G_t - V(s))\)
- By law of large numbers, \(V(s) \rightarrow v_{\pi}(s)\) as \(N(s) \rightarrow \infty\)
- In non-stationary problems, it can be useful to track a running mean (i.e., forget old episodes) \(V(s) \leftarrow V(s) + \alpha(G_t - V(s))\)
- \(\alpha\)가 1에 가까워질수록 현재 \(G_t\)에 가중치를 두고 0에 가까워질수록 과거의 estimate에 가중치를 둠
- Policy를 고정하고 policy evaluation을 할 때는 해당 policy에 대한 value는 고정되어 있으므로 현재든 과거든 동일한 가중치를 두는 게 상식적이지만, value iteration처럼 policy 자체가 매 iteration마다 바뀌는 경우 (특히 점점 더 policy가 좋아지는 경우), 현재에 가까울 수록 큰 가중치를 두는 게 상식적이다.
Every-Visit Monte-Carlo Policy Evaluation
- To evaluate state \(s\)
- Every time-step t that state \(s\) is visited in an episode,
- Note: 한 episode는 여러 state로 구성되므로, episode 동안 방문하는 모든 state에 대해 아래 \(N(s), V(s)\)를 update하는 꼴
- Increment the counter \(N(s) \leftarrow N(s) + 1\)
- Increment the value estimator \(V(s) \leftarrow V(s) + \frac{1}{N(s)}(G_t - V(s))\)
- By law of large numbers, \(V(s) \rightarrow v_{\pi}(s)\) as \(N(s) \rightarrow \infty\)
Temporal-Difference Learning (시간차 학습)
- TD methods learn directly from episodes of experience
- Non-episodic game에도 적용될 수 있다. MC와 다른 점.
- TD is model-free: no knowledge of MDP transitions/rewards
- TD learns from incomplete episodes, by bootstrapping
- 몇 번의 state transition을 통해 국소적인 subpath만 구성한 후 value를 추정한다. 따라서 ending이 없는 게임에도 활용할 수 있다.
- Subpath가 구성됐으면 종점 state의 value를 다시 어떤 방법으로 추정한다 (guess). 그 후 subpath 내의 states의 values와 합산하여 subpath 시작점 state의 value를 추정한다 (guess).
- MC는 ending까지 쭉 state transition을 하여 global하고 완전한 path하나씩 추출하여 value를 추정한다.
- TD updates a guess towards a guess.
- Goal: learn \(v_{\pi}\) online from experience under policy \(\pi\)
- Incremental every-visit Monte-Carlo
- Update value \(V(S_t)\) toward actual return \(G_t\) of an episode
- \(V(S_t) \leftarrow V(S_t) + \alpha(G_t - V(S_t))\)
- Simplest temporal-difference learning algorithm: TD(0)
- Note: 0의 의미가 무엇인지는 나중에 설명
- Fisrt, initialize \(V(s) \; \forall s\)
- Update value \(V(S_t)\) toward estimated return \(R_{t+1} + \gamma V(S_{t+1})\)
- \(V(S_t) \leftarrow V(S_t) + \alpha(R_{t+1} + \gamma V(S_{t+1}) - V(S_t))\)
- \(V(S_{t+1})\)가 이미 계산돼있다고 가정. 없으면 초기값을 어떤 상수로 준다.
MC vs. TD
- TD can learn before knowing the final outcome
- TD can learn online after every step
- MC must wait until the end of an episode before the return is known
- TD can learn without the final outcome
- TD can learn from incomplete sequences
- 그래서 초반엔 잘못된 update가 많다. \(V(S_{t+1})\) 자체도 확실치 않으므로. 그래서 \(\alpha\)를 너무 적게 주면 (\(<0.1\)) 과거의 추정치에 너무 매몰돼서 결과적으로 bias가 상당히 심해진다. 초반 수렴은 빨라도. 계산이 진행됨에 따라 점진적으로 \(\alpha\)를 늘려주는 게 좋다.
- Biased estimate
- MC can only learn from complete sequences
- Unbiased estimate
- TD works in continuing (non-terminating) environments
- MC only works for episodic (terminating) environments
Bias/Variance Trade-Off
- MD
- A return \(G_t = R_{t+1} + \gamma R_{t+2} + \cdots + \gamma^{T-1} R_T\) is unbiased estimate of \(v_{\pi}(S_t)\)
- Since \(v_{\pi}(S_t) = \mathbb{E}[G_t]\)
- TD
- TD target \(R_{t+1} + \gamma V(S_{t+1})\) is biased estimate of \(v_{\pi}(S_t)\)
- Bias/variance trade-off
- TD target is much lower variance than the return:
- A return depends on many random actions, transitions, rewards
- MC: 매 transition마다 randomness가 추가 되면서 결과가 매우 noisy하게 됨
- TD target depends on one random action, transition, reward
- MC has high variance, zero bias
- Good convergence properties
- (even with function approximation, it just converges to the correct answer)
- Function approximation이란 기법의 사용에 관해서는 나중에 다룰 예정
- 대강 말하자면, 이때까지는 \(v_{\pi}(s)\)를 추정할 때 각 state를 개별적으로 다뤘다. 그러나 \(v_{\pi}(s)\)도 state에 관한 함수이므로, 근접한 state들 끼리 어떤 연관성이 있을 수 있다 (see the random walk example on the 19th slide of Lecture 4: Model-Free Prediction (davidsilver.uk)). Function approximation 기법은 state function을 단순한 수의 나열이 아니라 function으로 인식하고 더 지능적으로 state function을 추정하는 방법이다. 예를 들어 state와 value 간의 linear regression 성향이 있는 것으로 관측된다면 그런 추측을 통해 \(v_{\pi}(s)\)를 더 잘 추정할 수 있다.
- Not very sensitive to the initial value function
- Very simple to understand and use
- TD has low variance, some bias
- Usually more efficient than MC
- TD(0) converges to \(v_{\pi}(s)\)
- (but not always with function approximation)
- More sensitive to the initial value function
- MC vs. TD bias/variance trade-off visualization
- Idea: 초반엔 알파 낮은 TD로 학습하다가 점진적으로 알파를 늘려나가고, 일정 에러를 달성하면 그 뒤부터는 unbiased한 MC estimate를 쓰면 어떨까?
- 비슷한 아이디어를 적용한 논문이 2019년도 제안됨: Adaptive Temporal-Difference Learning for Policy Evaluation with Per-State Uncertainty Estimates (neurips.cc)

MC vs. TD (2)
- TD exploits Markov property
- TD는 한 state에서 subpath를 만들기 위해 다른 state의 (estimated) value를 참고함. 이것 자체가 chain의 성질을 활용하는 것. 또한 후속 state의 value를 더하는 식 자체가 Markov property에 의해 유도되는 것.
- Episode를 더 많이 참고할 수록 state \(s\)의 후속 state \(s'\)의 value가 정확해지고, 이는 \(V(s)\)의 오차도 줄인다. 모든 state의 정확성은 상호 의존한다.
- Usually more efficient in Markov environments
- MC does not exploit Markov property
- MC의 경우 value estimation system이 관찰하는 것은 오직 한 state에서 시작한 episode가 끝날 때 받는 최종 reward (intermediate states의 value를 더하는 과정은 굳이 system이 알 필요 없음). 그것을 평균내는 것 뿐.
- 후속 state의 value estimation이 얼마나 정확한지는 현재 state와 무관하다.
- Usually more effective in non-Markov environments
- Note: MDP를 구성하기 위해서는 state가 Markov여야 한다. 그러나 로봇의 센서 정보로 state를 구성한다고 할 때 마구잡이로 구성하면 state가 Markov가 아닐 수 있다. 이런 경우에는 TD를 사용하면 제대로 된 해를 찾지 못할 수 있다. MC는 여전히 잘 동작한다.
- Note: 이는 강의 노트의 Batch MC and TD 예시에서 잘 드러난다.
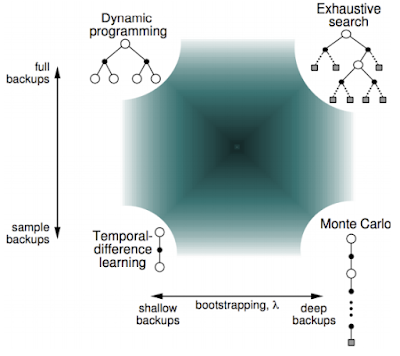
DP vs. MC vs. TD
- Dynamic programming backup

- DP는 한 state에서 전이할 수 있는 모든 state를 고려한다.
- 또한 \(\pi(a|s), T\)를 이미 알고있으므로 직접 기대값을 구할 수 있다.
- \(\mathbb{E}_{X\sim \mathrm{P}(X)}[X] = \sum_{i=1}x_i \mathrm{P}(x_i)\)
- 미리 구해둔 (또는 초기값) 바로 다음 state \(S_{t+1}\)의 value들과 Bellman expectation equation을 통해 현재 state의 value를 정확히 계산할 수 있다. (다만, policy evaluation의 iteration 중에는 각 state의 정확한 value를 구할 수 없으므로 David Silver는 estimate라고 표현한다.)
- Temporal-difference backup

- TD와 MC는 \(T\)를 모르는 unknown MDP 문제를 푸는 게 목적이다.
- 환경이 agent에게 state(와 reward)를 알려주면 agent는 그의 정책 \(\pi(a|s)\)을 통해 action을 sampling한다.
- 그 뒤, action을 환경에게 알려주면 환경은 그의 \(T\)를 통해 다음 state를 agent에게 알려준다. 이때 환경은 확률분포 \(T\)를 알고 있으므로 \(T(s'|s,a)\) 값을 계산(evaluation)할 수 있지만, agent는 계산할 수 없다. 즉, unknown MDP.
- 미리 구해둔 (또는 초기값) \(s'\)의 value estimate과 Bellman expectation equation을 통해 \(V(s)\)를 추정할 수 있다.
- Monte-Carlo backup

- TD(0)와 비슷하지만, action sampling을 recursive하게 반복하다가 최종적으로 termination state를 만나서 episode가 종료하고 난 뒤, 그 complete path의 reward \(G_t\)를 구한다.
- 미리 구해둔 value를 활용하지 않는다.
Bootstrapping and Sampling
- Sampling: a value update samples a (sub-)path to estimate the expectation
- DP does not sample (직접 기대값을 구할 수 있음)
- TD samples a subpath
- MC samples a path
- Bootstrapping: a value update exploit the previous value estimation (미리 구해둔 value를 활용)
- DP bootstraps
- TD bootstraps
- MC does not bootstrap
Unified View of RL
TD(\(\lambda\))
- \(n\)-step prediction
- TD(0)에서는 한 step만 lookahead하여 value를 추정하였다. 그러나 subpath의 길이가 꼭 1일 필요는 없을 것이다:

- \(n\)-step return
- \(G_t^{(n)} := R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} + \cdots + \gamma^{n-1}R_{t+n} + \gamma^n V(S_{t+n})\)
- \(n \rightarrow \infty\) 이면 MC가 된다.
- \(n\)-step TD
- \(V(S_t) \leftarrow V(S_t) + \alpha \left(G_t^{(n)} - V(S_t)\right)\)
- TD(\(\lambda\)) (forward-view)
- 몇 step을 쓰는 게 가장 좋을까? 실제로 MDP의 크기나 문제 세팅에 따라 최적의 step수는 계속 달라진다. 더 robust한 알고리즘을 만들기 위해 여러 step의 TD를 섞어서 쓸 수 없을까? 이런 고민으로 제안된 게 TD(\(\lambda\))이다. TD(\(\lambda\))는 가능한 모든 길이의 subpath를 고려한다.
- \(\lambda\)-return
- \(G_t^{\lambda} = (1-\lambda)\sum_{n=1}^{\infty}{\lambda^{n-1}G_t^{(n)}}\)
- \(V(S_t) \leftarrow V(S_t) + \alpha \left(G_t^{\lambda} - V(S_t)\right)\)
- Note: \(\lambda=0\)이면 길이 1의 subpath만 고려한다(현재 state와 바로 다음 state). \(\lambda \rightarrow 1\)일수록 다양한 길이의 subpaths를 고려한다.
- Note: \(G_t^{\lambda}\)의 의미 해석: 짧게 말해 geometric distribution. 매 state에서 \(1-\lambda\)의 확률로 terminate하고, \(\lambda\)의 확률로 transition 한다고 하자. 이렇게 \(n\)을 정할 때의 기대 reward가 \(G_t^{\lambda}\)이다.
- 1-step backup할 확률: \(1-\lambda\)
- 2-step backup할 확률: \(\lambda(1-\lambda)\)
- \(\vdots\)
- n-step backup할 확률: \(\lambda^{n-1}(1-\lambda)\)
- Note: The geometric distribution is the only memoryless discrete distribution. 그래서 TD(0)나 TD(\(\lambda\))나 똑같은 memory efficiency를 지닌다.
- Note: TD(0)는 one-step bootstrap을 하기 때문에 후속 state의 value가 update 되더라도 step이 멀리 떨어져 있으면 반영이 바로 안되고 episode를 여러 번 돌려야 반영된다. TD(\(\lambda\))는 \(\lambda\)를 조정하여 얼마나 한 state의 변화가 이전 state들에 반영될지 결정한다:

- TD(\(\lambda\))는 꽤 robust한 알고리즘이며, 대충 \(\lambda=0.9\)를 쓰면 최적이라고 한다.
- Vanilla TD(0)나 MC와는 다르게, bias/variance 간의 균형을 잘 잡아준다.
- TD(\(\lambda\)) (backward-view)
- 다만 forward-view의 문제점은 단번에 \(G_t^{\lambda}\)를 구하기 위해서 결국 MC처럼 episode의 끝을 봐야한다는 점이다.
- Backward-view TD updates value estimates online, at every step, from incomplete sequences. 또한 동시에 모든 state의 value를 update한다.
- Def. Eligibility Traces
- \(\forall s \in S, t \in [0,\infty),\) define eligibility traces \(E_t(s)\) as follow:
- \(E_0(s) = 0,
\\ E_t(s) = \gamma \lambda E_{t-1}(s) + \mathbf{1}(S_t=s)\) - 따라서 state \(s\)에 잦게 방문할 수록 eligibility trace는 커지고, 어떤 시점에 방문을 한 뒤부터 방문을 더 안하고 있으면 지수적으로 줄어든다.
- Backward-view TD(\(\lambda\))
- Keep an eligibility trace for every state
- Update value \(V(s)\) for every state
- In proportion to eligibility traces:
- \(\delta_t = R_{t+1} + \gamma\,V(S_{t+1})-V(S_t)
\\ V(s) \leftarrow V(s) + \alpha \delta_t E_t(s)\) - \(E_t(s)\)의 정의에 따라 어느 한 시점에 방문을 하면 그 뒤부터 지수적으로 \(\delta_t\)에 적용되는 가중치가 줄어든다.
- Thm. Forward-backward Equivalence
- Offline updates: updates are accumulated within an episode but applied in batch at the end of an episode.
- The sum of offline updates is identical for forward-view and backward-view TD(\(\lambda\)):
- \(\lim_{T\rightarrow\infty}\sum_{t=1}^T{\alpha \delta_t E_t(s)} = \lim_{T\rightarrow\infty}\sum_{t=1}^T{\alpha \left (G_t^{\lambda} - V(S_t) \right ) \mathbf{1}(S_t=s)}\)
- Note: online update를 사용하면 eligibility trace term을 살짝 바꿈으로써 forward-view와 backward-view를 동치로 만들 수 있다.
- Sketch of Proof)
- 모든 항을 비교하긴 귀찮으니 양변의 항 \(\lambda^{l-1}\mathbf{1}(S_t=s)\)의 계수를 비교해서 같은지 비교하면 된다.
- Eligibility trace의 recursive한 정의를 풀면(unroll):
- \(E_t(s) = (\gamma \delta)^0\mathbf{1}(S_t=s) + (\gamma \delta)^1\mathbf{1}(S_{t-1}=s) + \cdots + (\gamma \delta)^{t-1}\mathbf{1}(S_1=s)\)


댓글
댓글 쓰기